Toma Kato, Kazuyoshi Tagawa, Hiromi T. Tanaka, Yoshimasa Kurumi, Masaru Komori and Sigehiro Morikawa, "Evaluation of Haptic Teaching Approaches for Laparoscopic Surgery Training", Stud Health Technol Inform (MMVR2014), 2014.
Kazuyoshi Tagawa, Hiromi T. Tanaka, Yoshimasa Kurumi, Masaru Komori and Sigehiro Morikawa, "A Laparoscopic Surgery Simulator Using First Person View and Guidance Force", Stud Health Technol Inform (MMVR2013), 2013.
Kazuyoshi Tagawa, Tatsuro Bito and Hiromi T. Tanaka, "A Method of Synchronization for Haptic Collaborative Virtual Environments in Multipoint and Multi-level Computer Performance Systems", Stud Health Technol Inform (MMVR2011), pp.638-644, 2011.
備藤達郎, 田川和義, 田中弘美: 多地点遠隔触覚協働環境におけるオンラインリメッシュ型ボリュームモデルの変形同期手法, 日本バーチャルリアリティ学会第15回大会抄録集, pp. CD, 2010.(学術奨励賞受賞)
大石達弥,田川和義,田中弘美: 一対多の教示機能を備えた遠隔触覚協働環境の構築, 日本VR医学会学術講演会抄録集, pp. CD, 2010.
Kazuyoshi Tagawa, Naoko Omi, Hiromi T. Tanaka, Masaru Komori, Yoshimasa Kurumi and Shigehiro Morikawa, "A Semi-Automatic Modeling Approach for Serosa and Adhesion", In Proc. of IEEE EMBC (IEEE-EMBC2013), 2013.
Masaru Komori, Kazuyoshi Tagawa, Hiromi T. Tanaka, Yoshimasa Kurumi and Shigehiro Morikawa, "Current Status of Organ Variation 3D Model Library Construction", In Proc. of IEEE EMBC (IEEE-EMBC2013), 2013.
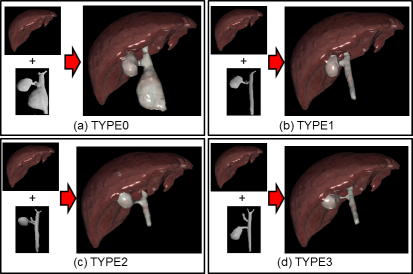
Kazuyoshi Tagawa, Hiromi T. Tanaka, Yoshimasa Kurumi, Masaru Komori and Sigehiro Morikawa, "Expression of Cystohepatic Duct Anomaly Using Modular Structured Organ Model in a Laparoscopic Surgery Simulator", International Journal of Computer Assisted Radiology and Surgery (CARS2012), 2012.
Kazuyoshi Tagawa, Takahiro Yamada and Hiromi T. Tanaka, "A Rectangular Tetrahedral Adaptive Mesh Based Corotated Finite Element Model for Interactive Soft Tissue Simulation", In Proc. of IEEE EMBC, pp.7164-7167, 2013.
Kazuyoshi Tagawa, Yasuyuki Sasaki and Hiromi T. Tanaka, "Online Re-Mesh and Multi-Rate Deformation Simulation by GPU for Haptic Interaction with Large Scale Elastic Objects", In Proc. of IEEE Haptics, pp.531-538, 2012.
Yasuyuki Sasaki, Kazuyoshi Tagawa and Hiromi T. Tanaka, "Stable Force Presentation by Fast Deformation Computation Using Online-Remesh and GPU", In Proc. of ACM Haptic and Audio Interaction Design, pp. CD, 2011.
Kazuyoshi Tagawa and Hiromi T. Tanaka, "A Hybrid Dynamic Deformation Model for Surgery Simulation", In Proc. of Medicine Meets Virtual Reality, pp.645-649, 2011.
Kazuyoshi Tagawa, Tatsuya Oishi and Hiromi T. Tanaka, "Adaptive and Embedded Deformation Model: An Approach to Haptic Interaction with Complex Inhomogeneous Elastic Objects", In Proc. of IEEE Haptics, 2013.
Koichi Hirota, Kazuyoshi Tagawa, "Acquisition of Elastically Deformable Object Model Based on Measurement", Haptics: Perception, Devices and Scenarios, LNCS 5024 (Eurohaptics2012), 2012.
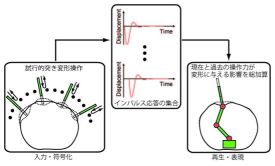
Kazuyoshi Tagawa, Koichi Hirota and Michitaka Hirose, "Manipulation of Dynamically Deformable Object using Impulse-Based Approach", in Book of "Advances in Haptics" (ISBN 978-953-307-093-3), 2010.
Kazuyoshi Tagawa, Koichi Hirota, and Michitaka Hirose, "A Data Compression Method for Impulse Response Deformation Model",
In Proc. of Third Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Enviroments and Teleoperator Systems (WorldHaptics09), Mar. 2009.
Kazuyoshi Tagawa, Koichi Hirora, and Michitaka Hirose, "Surface Contact Interaction with Dynamically Deformable Object", In Proc. of 6th International Conference of EuroHaptics 2008, pp.675-680, Jun. 2008.
Kazuyoshi Tagawa, Koichi Hirora, and Michitaka Hirose, "Manipulation of Dynamically Deformable Object", In Proc. of 16th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (IEEE Haptics08), pp.327-333, Mar. 2008.
田川和義, 広田光一, 廣瀬通孝, 「力覚インタラクションのための動的変形モデル」, 電子情報通信学会論文誌, Vol.J90-D, No.9, pp.2615-2623, Sep. 2007.
Kazuyoshi Tagawa, Koichi Hirota, and Michitaka Hirose, "Dynamic
Deformation Model for Haptic Interaction", IEICE Trans. on Information
and Systems, Vol.J90-D, No.9, pp.2615-2623, Sep. 2007.
Kazuyoshi Tagawa, Koichi Hirota, and Michitaka Hirose, "Acquiring &
Representing Elasticity of Deformable Objects using Impulse Response
Deformation Model", NASA Ames Research Center, Moffett Field, CA, USA,
Mar. 2007.
Kazuyoshi Tagawa, Koichi Hirota, and Michitaka Hirose, "Impulse
Response Model: an Approach to Haptic Interaction with Dynamically
Deformable Object", In Proc. of 14th Symposium
on Haptic Interfaces for Virtual Environment and Teleoperator Systems
(IEEE Haptics06), Mar. 2006.
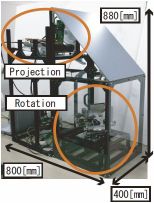
Yusuke Doyama, Tomohiro Tanikawa, Kazuyoshi Tagawa, Koichi Hirota and Michitaka Hirose, "CAGRA: Optimal Parameter Setting and Rendering Method for Occlusion-capable Automultiscopic Three-Dimensional Display", In Proc. of IEEE Virtual Realiry 2010 (IEEE-VR2010), Mar. 2010.
Yusuke Doyama, Tomohiro Tanikawa, Kazuyoshi Tagawa, Koichi Hirota and Michitaka Hirose, "CAGRA: Occlusion-capable Automultiscopic 3D Display with Spherical Coverage", In Proc. of 18th International Conference on Artificial Reality and Telexistence (ICAT08), pp.36-42, Dec. 2008.
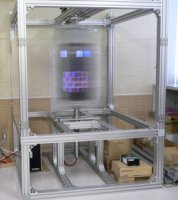
Koichi Hirora, Kazuyoshi Tagawa, and Yasuhiro Suzuki, "Automultiscopic Display by Revolving Flat-panel Displays", In Proc. of IEEE Virtual Realiry 2008 (IEEE-VR08), pp.161-168, Mar. 2008.
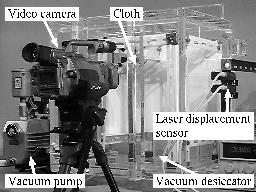
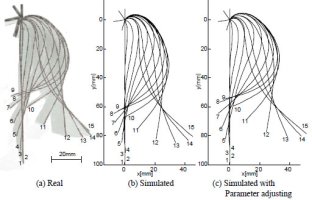
Kazuyoshi Tagawa, Hirotaku Hayashi, and Ryugo Kijima, "Empirical
Evaluation of Cloth Behavior Simulation", In Proc. of Int. Conf. on
VSMM '04, Int. Soc. On VSMM, 2004.
Kazuyoshi Tagawa, Hirotaku Hayashi, and Ryugo Kijima, "Evaluation
of Cloth Behavior Simulation", In Proc. of Symposium on Computer
Graphics and Animation, ACM Siggraph / Eurographics, 2004.
田川和義, 林 宏卓, 木島竜吾, 「布挙動のシミュレーションと真空実験による評価」,
日本バーチャルリアリティ学会論文誌、vol. 8, no. 3, pp. 263-270, VRSJ, 2003.
Kazuyoshi Tagawa, Hirotaku Hayashi, and Ryugo Kijima, "Dynamic Cloth
Simulation and its Evaluation Experiments in Vacuum", Transaction
of Virtual Reality Society of Japan, vol. 8, no. 3, pp.263-270,
2003. [PDF]
田川和義,垣見友和,小鹿丈夫,木島 竜吾, 「バーチャルファッションシステムにおける布の形状の動的シミュレーションの研究」,岐阜大學工學部研究報告,pp.93-100, 1999.
Kazuyoshi Tagawa, Tomokazu Kakimi, Ryugo Kijima, and Takeo Ojika, "Dynamic Cloth Simulation Method using an Elastic Model on the Virtual Fashion System", In Research reports of the Faculty of Engineering, Gifu University, pp.93-100, 1999.
Kazuyoshi Tagawa, Tomokazu Kakimi, Ryugo Kijima, and Takeo Ojika, "A Method for Dynamic Cloth Simulation and Application in a Virtual Fashion System", In Proc. of Int. Conf. on
VSMM '98, Int. Soc. On VSMM, 1998.